Utvikling av BLDC motorstyringer:
Høy integrasjon og maksimal driverfleksibilitet for motorstyringer
Her gjennomgår vi kort driftsprinsippet til BLDC-motoren før vi vurderer egenskapene, fordelene og ulempene ved to av de mest brukte kommuteringsmetodene.
Denne artikkelen er 2 år eller eldre
I motsetning til den
konvensjonelle DC-motoren med børster, som er mekanisk selvkommuterende, krever
styring av den trefasede børsteløse DC-motoren med permanent magnet (BLDC) en
elektronisk kommuteringskrets, eller strømvenderkrets om du vil. I denne
artikkelen gjennomgår vi kort driftsprinsippet til BLDC-motoren før vi vurderer
egenskapene, fordelene og ulempene ved to av de mest brukte kommuteringsmetodene
når det gjelder kompleksitet, dreiemoment-rippel og effektivitet. Vi vurderer
deretter en innovativ ny tilnærming til BLDC-kommutering og diskuterer
funksjonene og fordelene med en ny integrert krets (IC) for motorstyring fra
onsemi som kan implementere hvilken som helst av de tre kommuteringsmetodene.
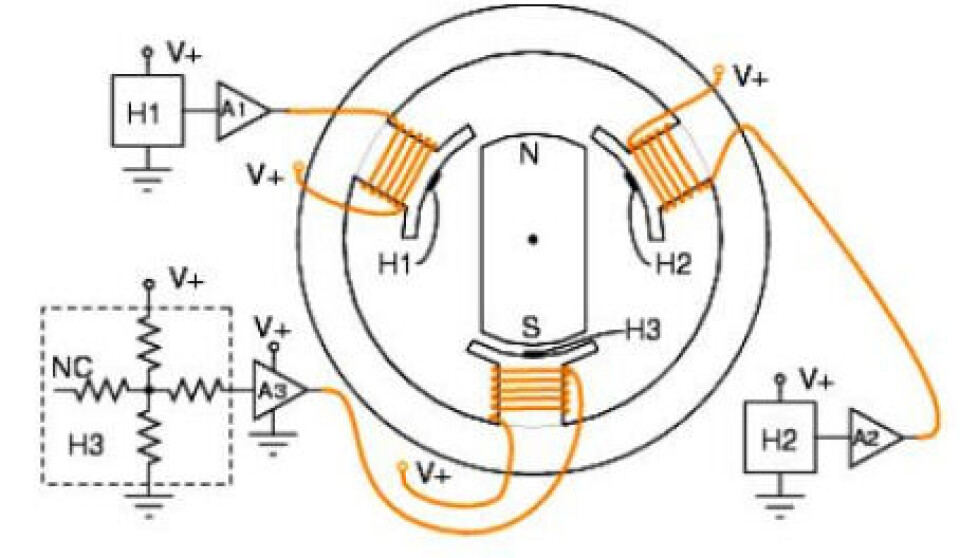
BLDC konstruksjon
BLDC-motoren er en roterende elektrisk motor som består av trefasede armaturviklinger på statoren og permanente magneter på rotoren. Den mekaniske strukturen til BLDC-motoren er det motsatte av den konvensjonelle permanentmagnetbaserte DC-motoren med børster, ettersom rotoren inneholder permanentmagnetene. Til gjengjeld er motorviklingene montert på statoren. Men som navnet antyder, har ikke BLDC-motoren børster som krever periodisk vedlikehold eller utskifting, noe som gjør den mindre utsatt for slitasje.
Effektiv
Permanentmagnetene på rotoren til BLDC-motoren gir et konstant magnetfelt som muliggjør en svært effektiv motor med høyt dreiemoment og med lavt treghetsmoment. BLDC-motorens iboende pålitelighet og mulighet for drift med variabel hastighet gjør den populær i en rekke bruksområder, inkludert hvitevarer, HVAC, bil- og industrimaskiner, inkludert robotikk.
Kommuteringskretsen
Kommuteringskretsen for den trefasede BLDC-motoren er generelt implementert med diskrete komponenter eller en MCU og en integrert strømmodul. Å designe med diskrete komponenter krever betydelig designekspertise for å konstruere og feilsøke og ikke minst tid for å implementere. Å bruke en dedikert motorstyrings-IC med et diskret effekttrinn har blitt en mer populær tilnærming fordi det kreves få eller ingen ekstra kretser, og mange produsenter tilbyr dedikert programvare som følger med produktet deres, noe som betydelig forenkler oppsett og feilsøking.
Integrert løsning
En fullstendig diskret løsning kan ofte minimere komponentkostnadene til løsningen. En mer integrert løsning reduserer imidlertid de totale systemkostnadene gjennom redusert kretskortareal og færre produksjonstrinn – noe som igjen minimerer materialkostnader, reduserer lagerkostnader og fremmer rask gjenbruk av løsningsderivater i nye design – samt øker den generelle løsningens pålitelighet. Nå er også en dedikert styrekrets med et diskret effekttrinn tilgjengelig fra onsemi.
Styring av BLDC
I motsetning til en typisk børstebasert DC-motor, er et motorstyringssystem for en BLDC kjent som en inverter, eller vekselretter. Den består av et effekttrinn for å drive motoren, sensorforsterkere for å registrere mot-emf-signalene for sensorløs drift, en koder eller hallsensorer for sensorisk drift, og en MCU-basert kontroller. Kontrolleren konverterer tilbakemeldingsinformasjonen om hastighet og posisjon til passende PWM-signaler for dynamisk å styre motoren.
Fordeler
Økte kostnader og kompleksitet for et inverterbasert system oppveies av mange fordeler: Forbedret pålitelighet og energieffektivitet, redusert støy, et bredere driftsområde og utmerket kontroll over hastighet og dreiemoment. For å implementeres krever en BLDC-omformer ytterligere ekspertise innen elektronisk design, layout og fastvareprogrammering, og tilgang til verktøy og ressurser for å utføre disse oppgavene.
Algoritmer
To kommutasjonsalgoritmer som er mye brukt i BLDC-systemer er trapesformet og feltorientert styring (FOC), også kjent som vektorstyring. Trapesformet kommutering er den enkleste, men er den minst effektive og mest støyende metoden. FOC er mer komplisert å implementere, men er generelt mer stillegående og mer effektiv. Begge metoder kan være sensorbasert eller sensorløs.
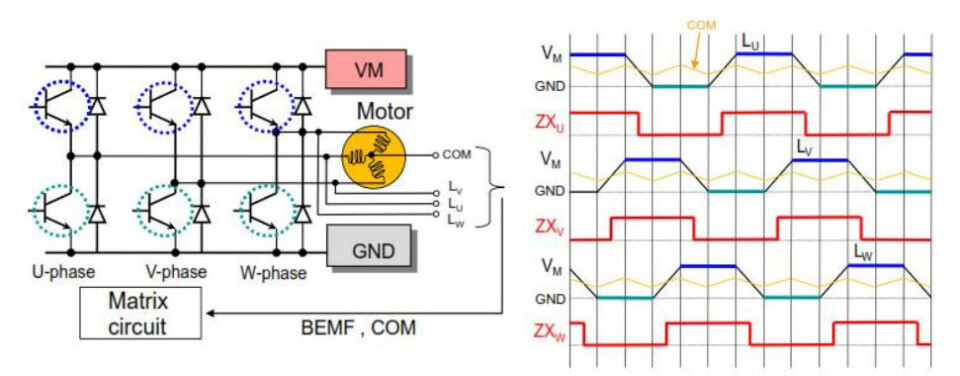
Trapesformet kommutering
Trapesformet kommutering bruker to svitsjeenheter på hver motorfase som følger en forhåndsbestemt "på-av"-sekvens. Denne metoden er populær på grunn av enkelheten til styringsalgoritmen og muligheten til å implementere på rudimentære MCUer. Trapesformet styring er svært effektiv for å styre motorhastigheten, men er den minst effektive metoden. Fortsatt lider den av høy dreiemoment-rippel under kommutering, spesielt ved lav hastighet – og er populær for lav-ende-applikasjoner som krever en enkel, lukket-sløyfeoperasjon.
Det genereres betydelig dreiemomentrippel på grunn av ikke-lineariteter, ettersom kun to av tre motorviklinger fører strøm til enhver tid. Som et resultat skaper ikke-linearitetene støy og vibrasjoner, og strømkontrolleren må være treg nok til å ikke reagere på transientene fra strømoverføringen som beveger seg fra fase til fase, noe som begrenser den totale ytelsen. En 180° kommuteringsmetode kan generere høyt dreiemoment med trapesformet kommutering, men 120° kommutering minimerer dreiemomentrippel. Svitsjesekvensen er bestemt til å utføre to påfølgende motorfaser (med et 60° intervall) mens motoren snurrer.
Feltorientert styring (FOC)
FOC er en mer kompleks kommuteringsmetode med høyere prosesseringskrav som gjør den bedre egnet for avanserte applikasjoner. Fordelene med FOC fremfor trapes inkluderer presis posisjonering, høyere hastighetsevne, lavere dreiemomentrippel og støy, og forbedret energieffektivitet. Med FOC blir motoren sensorløst kommutert ved å beregne spennings- og strømvektorer basert på motorstrømtilbakemelding, men den kan også bruke Hall effekt-sensorer hvis det er nødvendig for applikasjonen.
FOC opprettholder høy effektivitet over et bredt driftsområde, noe som muliggjør presis dynamisk styring av både hastighet og dreiemoment. I FOC er de tre statorstrømmene representert som en vektor sammensatt av det ortogonale dreiemomentet og magnetiske flukskomponenter. Matematiske Clarke og Park-transformasjoner konverterer tidsvarianten vekselstrøm og spenningsbølgeformer til likestrømsverdier, noe som forenkler nedstrøms prosesseringskrav betydelig. Den viktigste ulempen med FOC er den økte prosessorkraften som kreves, som kan kreve en kraftigere MCU.
Direkte styring av dreiemoment og fluks
Selv om DTC og DTFC har eksistert en stund, er en ny tilnærming til sensorløs BLDC-kommutering utviklet av Theta Power Solutions, Intl (TPSI) for å styre dreiemomentet og fluksen direkte. Selv om DTFC ikke er et nytt konsept, har TPSI utviklet en unik, mer effektiv metode som gir BLDC-motorer flukssvekking for utvidet høyhastighetskapasitet. Den er ideell for bremsealgoritmer, i stand til å gi kontrollert retardasjon med høye treghetsbelastninger.
Databuss
Den anvender en høyhastighets databuss som bærer sanntids tilbakemeldingsinformasjon fra motoren for å gi maksimalt dreiemoment per ampere (MTPA) for styrestrømmen. Den sikrer høy motoreffektivitet under alle belastningsforhold (selv ved metning) og har termisk kompensasjon for motorer som kjører uavbrutt eller i ekstreme temperaturer. For applikasjoner som krever presist dreiemoment ved svært lave hastigheter er TPSIs implementering en utmerket sensorløs løsning på dette problemet, som lar brukeren redusere systemkostnadene, ettersom sensorer ikke er nødvendige.
Fordeler ved TPSIs løsning
Noen fordeler ved TPSIs implementering vs. tradisjonell DTC (og FOC) inkluderer men er ikke begrenset til:
- Oppstart i lukket sløyfe med svært lavt strømbehov
- Overlegen stabilitet ved utvidete hastighetsområder
- Sensorløs av natur
- Høyhastighets telemetri åpner for bruk av motoren som sensor
- Maksimalt dreiemoment per ampere
- Støy er minimal
- Enkelt å skalere opp ytelsen
- Utmerket ytelse ved lav hasitghet (~5Hz) uten sensorer
- Klassens beste regulering av dreiemoment over hele hastighetsområdet
- Brukergrensesnitt som forenkler opgaven med å få motoren opp og gå raskt
TPSIs DTFC krever ekstra prosessorkraft for å implementeres. ECS640A er den første i bransjen med denne avanserte styreteknikken implementert på en Arm Cortex−M0+ klasse MCU.
3-i-1 valg av styremetode
ecoSpin-familien av konfigurerbare motorkontrollere fra onsemi tilbyr fritt valg av en av de tre styremetodene som tidligere er vurdert. ECS640A er den første komponenten i denne familien og er en System-in-Package (SiP) løsning. Den integrerer en Arm Cortex−M0+ mikrokontroller, tre sensorforsterkere, en referanseforsterker, tre bootstrap-dioder og en høyspennings gate-driver designet for høyspennings, høyhastighets drift, alt i en enkelt 10 mm x 13 mm QFN-pakke. Den kan drive MOSFET-er og IGBT-er som opererer opp til 600 V (FAN73896) og har seks portdriverutganger for å synke eller source 350 mA/650 mA (typisk) gatestrøm til eksterne strømenheter. Enheten inkluderer GPIO Hall sensor-innganger for å støtte sensorisk drift hvis ønskelig, og har tre uavhengige lavside sourcepinner som tillater enkle- eller flere shuntmålinger.
Lite fotavtrykk
Det lille fotavtrykket og høye integrasjonsnivået gjør denne komponenten perfekt for bruk med diskrete kraftkomponenter for å maksimere skalerbarheten. Den inkluderer et programvareutviklingssett (SDK), som består av en flash-laster, enhetsoppstart og systemfiler, periferidrivere (CMSIS-driverstil) og eksempelkode for periferidemonstrasjon. onsemi har også samarbeidet med Theta Power Solutions, Inc. for å gjøre DTFC-fastvare tilgjengelig for ECS640A. Dette muliggjør optimal motorytelse på Arm Cortex−M0+-prosessoren uten behov for å utføre kommuteringen med en kraftigere og dyrere MCU-løsning.
Brukervennlig
Det brukervennlige grafiske brukergrensesnittet forenkler kodeutvikling og reduserer time-to-market. Brukere vil sette pris på den integrerte løsningen, som automatisk genererer koeffisientparametere for den spesifikke motoren som brukes, noe som gjør systemet enkelt og raskt å sette opp og kjøre, i stedet for å gå seg vill i detaljene for å få motoren til å gå rundt.
Fleksibilitet og integrasjon
BLDC-motorer blir stadig mer populære i ulike applikasjoner, men krever riktig kommutering for å utnytte fordelene deres fullt ut. Når du velger en BLDC motorkontroller-IC, er det fornuftig å velge en som tilbyr det bredeste antallet kommuteringsalternativer, og med høy integrasjon. ECS640A motorkontrolleren fra onsemi gir både fleksibilitet og brukervennlighet for sensorbaserte og sensorløse applikasjoner.
Om forfatteren:
Joe Howell er senior systemingeniør hos onsemi.





























