Autonome systemer:

CMOS bildesensorer gir autonome kjøretøy øyne
For å orientere seg i omgivelsene trenger autonome enheter gode «øyne». Men det fins noen viktige kriterier å ta hensyn til.
Denne artikkelen er 2 år eller eldre
Å gjøre helt autonome kjøretøy til virkelighet vil kreve
kombinasjon av informasjon fra flere typer sensorer, hvorav kameraer kanskje
vil være de viktigste. Det vil være avgjørende at disse kameraene kontinuerlig
er i stand til å fange selv de minste detaljene under alle forhold, for å
garantere sikkerheten til passasjerer i kjøretøy samt andre trafikanter. I
denne artikkelen ser vi på nøkkelfunksjonene du bør se etter når du velger en
bildesensor som gir den optimale kombinasjonen av funksjoner som kreves for
bruk i autonome kjøretøy.
Fra fotoner til informasjon
Bildesensorer konverterer lysfotoner til elektroner, som deretter lagres som digitale bildedata. Bildesensorer brukes nå ofte i kamerasynsapplikasjoner, alt fra smarte fabrikker, medisinsk bildebehandling til bilindustrien. Valget av bildesensor avhenger av ytelsesnivået som kreves for en gitt applikasjon. Å ha kunnskap om nødvendig bildefrekvens, forventede lysforhold og ønskede systemtoleranser er et nyttig utgangspunkt når man skal bestemme seg for den beste bildesensoren som skal brukes, men mangel på ingeniørkompetanse i synssystemer kan gjøre prosessen skremmende. Heldigvis er det flere kriterier som kan brukes til å sammenligne ytelsen til forskjellige bildesensorer.
Sensoroppløsning
Sensoroppløsning er en kritisk spesifikasjon i applikasjoner der målenøyaktighet er viktig, fordi den bestemmer antall piksler på radene og kolonnene på den lysfølsomme overflaten som fanger bildet. Minimumsantallet piksler som kreves avhenger av den minste funksjonen som skal oppdages i et bilde. Mens det i teorien bare kan brukes 2 piksler per dimensjon for å løse en enkelt karakteristikk ved et objekt, betyr mangel på kontrast, samt bildestøy, at det for praktiske bruksområder kreves minst 4 eller 5 overlappende piksler for å løse en funksjon fullstendig.
Følsomhet
Følsomhet er et mål på hvor effektivt en sensor konverterer fotoner til elektroner, og er viktig i praktisk talt alle applikasjoner. Det er et mål på tiden og belysningsstyrken (belysning) som kreves for at en sensor skal kunne se et brukbart bilde. Følsomheten påvirkes også av sensorstøy, noe som gjør signal-til-støy-forholdet (SNR) til en viktig spesifikasjon. Sensorer med høy SNR gir bilder av høyere kvalitet under dårlige lysforhold. Følsomhet er spesielt viktig i overvåking og medisinske applikasjoner som krever høy bildekvalitet selv under dårlige lysforhold. Følsomhet er oppgitt på dataarket for en bildesensor, men det kan noen ganger være vanskelig å sammenligne følsomheten til sensorer fra forskjellige produsenter. Kravet om høye detaljnivåer selv under svært lave (nesten mørke) lysforhold gjør at oppløsning og følsomhet er nøkkelspesifikasjoner for å undersøke nøye når du velger en bildesensor for bruk i et autonomt kjøretøy.
Dynamisk område
Dynamisk område er forholdet mellom minimumssignalet (støy) og den fulle brønnkapasiteten til en piksel, og det definerer hvor mange forskjellige nivåer av lysstyrke som er til stede i et bilde. Dette er en spesielt viktig funksjon i applikasjoner som opplever ekstreme lysforhold. Måleresultater for det dynamiske området er basert på EMVA (European Machine Vision Association) 1288-standarden og er oppgitt i desibel (dB), noe som gjør det enkelt å sammenligne på tvers av de fleste sensordataark.
Rammehastighet
Rammehastighet, eller bildehastighet er et mål på sensorhastighet gitt av antall bilder (rammer) per sekund (fps) som den kan lese elektronisk. En høy bildefrekvens er viktig i applikasjoner som fanger opp objekter i rask bevegelse, der kort eksponeringstid er avgjørende for å forhindre uskarphet og redusere bevegelsesartefakter. Den maksimalt oppnåelige bildefrekvensen reduseres etter hvert som antallet sensorpiksler øker. For eksempel kan høyere bildefrekvenser oppnås ved å bruke en VGA (Video Graphics Array) bildesensor av lav kvalitet enn med en fulloppløsningssensor på 20 MP. Å kombinere høy bildefrekvens med høy oppløsning er mulig ved å bruke sensorer som støtter «interesseområder» (ROI). Disse definerer ett eller flere områder i et bilde som skal detekteres for behandling, og alle andre bildeområder ignoreres. Dette reduserer effektivt den totale bildeoppløsningen, og muliggjør høyere bildefrekvenser. I likhet med standardbiler vil autonome kjøretøy oppleve et bredt spekter av lysforhold mens de kjører i høy hastighet, noe som gjør høyt dynamisk område og høy bildefrekvens kritiske funksjoner når de velger en bildesensor for denne applikasjonen.
Bevegelse og farger
Rullerende lukker og global lukker er de to avlesningsmetodene som brukes av CMOS-bildesensorer. Den rullerende lukkermetoden leser en sensors piksler ut linje for linje etter hvert som de blir eksponert, noe som gjør det til en veldig rask teknologi. Den bruker færre transistorer per piksel, har mindre støy, er mer følsom og rimeligere enn sensorer som bruker en global lukker. Sensorer med rullerende lukker anbefales i applikasjoner som krever høyt dynamisk område. For global lukkeravlesning eksponeres hver piksel samtidig, så det er ingen opptaksforsinkelse mellom piksellinjene. Imidlertid er denne tilnærmingen kostbar og vanskelig å implementere.
Monokrom eller farge
Mens monokrome bildesensorer er akseptable i applikasjoner som måleregistrering og tilstedeværelsesdeteksjon, kreves det nå farge i mange applikasjoner. Ikke desto mindre gir monokrome sensorer noen fordeler. For at en sensor skal gi et fargebilde, brukes RGB-filtre på en piksel-for-piksel basis, arrangert i et Bayer-mønster. En effekt ved Bayer-fargeinterpolering er imidlertid at den reduserer detaljer og generell målingsnøyaktighet. Derfor bør en fargesensor kun brukes hvis applikasjonen krever fargeinformasjon. Åpenbart vil applikasjoner for autonome kjøretøy kreve fangst av fargebilder og en sensor som bruker en rullende lukkertilnærming.
Pikselstørrelse
Det er en misforståelse at en større pikselstørrelse korrelerer med bedre bildekvalitet. Mens større pikselstørrelser har mer tilgjengelig område for å samle lys, betyr det ikke at du får bilder av bedre kvalitet. Det er greit å merke seg at faktorer som oppløsning og pikselstøymålinger også spiller en betydelig rolle for å bestemme bildekvaliteten. Små piksler har en tendens til å ha lavere mørkesignal-ujevnhet (DSNU); ved høyere temperaturer begrenser DSNU ytelsen ved lite lys. I noen tilfeller kan en sensor med mindre piksler overgå den med større piksler. Når du designer kamerasystemer, er det viktig å vurdere den optimale balansen mellom hastighet, følsomhet og bildekvalitetsegenskaper for å oppnå overlegen ytelse.
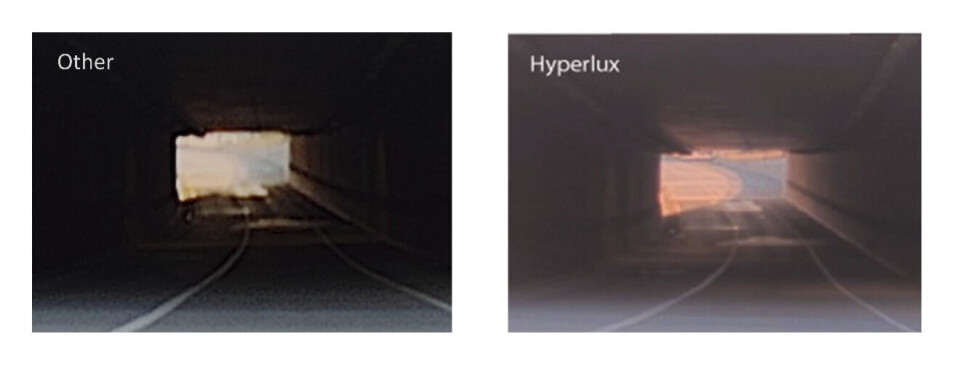
CMOS sensorløsning
Sensorfamilien Hyperlux er andre generasjon supereksponerte pikselteknologiplattform fra onsemi som leverer enestående ytelse i oppløsninger fra 3 MP til 8 MP og høyere for bildebehandlingsapplikasjoner for biler. >120 dB flimmerfri (FF) enkelteksponering og 150 dB ultrahøyt dynamisk område (HDR) med LED-flimmerdemping (LFM)-teknologi gir stabil bildekvalitet og dynamisk område over biltemperaturområdet, og eliminerer behovet for å endre innstillinger ved varierende lysforhold, noe som reduserer ventetiden og forbedrer sikkerheten. Bildesensorene på 2,1 µm inkluderer fleksible funksjoner som smart ROI, binning, windowing og dobbel utgang. Disse funksjonene muliggjør fleksible dataformatutganger som forskjellige oppløsninger (ROI) og forskjellige integrasjonstidsdata parallelt. Sensoren er designet for ASIL-D systemet, og dens sofistikerte sanntids sikkerhetsmekanismer og feildeteksjonsfunksjoner bidrar til å oppnå det høyere nivået av ADAS-systemer.
Forståelse er avgjørende for valg
I denne artikkelen har vi forklart nøkkelfunksjonene du bør vurdere når du velger en CMOS bildesensor for bruk i autonome kjøretøyapplikasjoner, inkludert oppløsning, følsomhet, hastighet, dynamisk område, bevegelse og farge. Hyperlux-bildesensorene fra onsemi gir den optimale kombinasjonen av hver av disse funksjonene, noe som gjør den ideell for bruk i en rekke kjøretøyapplikasjoner.





























