Presisjonsposisjonering flytter innendørs
Bluetooth bringer nå et nytt svar på problemstillingen rundt nøyaktig innendørs posisjonering. Vi testet teknologien i et industrielt lager i et “proof of concept” forsøk.
Denne artikkelen er 2 år eller eldre
Plasseringsbevissthet: Dette er en av de viktigste fordelene som IoT-teknologien har gitt bedrifter – og forbrukere. Til en beskjeden pris kan flåteforvaltere spore kjøretøyene sine, logistikkfirmaene sine fraktede varer og bøndene deres husdyr – alt i sanntid. I mellomtiden kan du og jeg kjøpe en tilkoblet enhet for å holde øye med en aldrende slektning, kjæledyrene våre eller verdifulle eiendeler som for eksempel en bil.
Økende nøyaktighet
Lokaliseringsteknologi er muliggjort av globale navigasjonssatellittsystemer (GNSS), som GPS, GLONASS, BeiDou og Galileo, og har funnet veien inn i nesten alle aspekter av vår økonomi og våre daglige liv. Hele tiden har GNSS-teknologien forbedret seg år etter år, med oppnåelige nøyaktigheter fra meter til bare centimeter, tiden som går til første reparasjon har beveget seg fra titalls sekunder til sekunder, og tjenestetilgjengelighet utvider dekningen til selv de tetteste urbane stedene.
Blindsone: Innendørs
Likevel har høypresisjonsposisjonering fortsatt én viktig blindsone: de store innendørsarealene. Svake GNSS-signaler trenger ikke effektivt inn i de fleste innendørsrom. Som et resultat fins det mengder av aktiviteter forbedringene i effektiviteten som er muliggjort gjennom denne kontinuerlige plasseringsbevisstheten ikke har nådd frem til:
- Sykehusledere som sporer medisinsk utstyr, pasienter og ansatte.
- Lufthavnoperatører som vil optimalisere bagasjehåndtering og raskt lokalisere forsinkede passasjerer.
- Produksjonsselskaper som automatiserer produksjonsprosesser.
- Tjeneste- og varehandelsorganisasjoner som sporer kundevaner og støttefunksjoner.
- Lageroperatører som oppgraderer driften med ubemannede bakkeroboter.
Flere teknologier
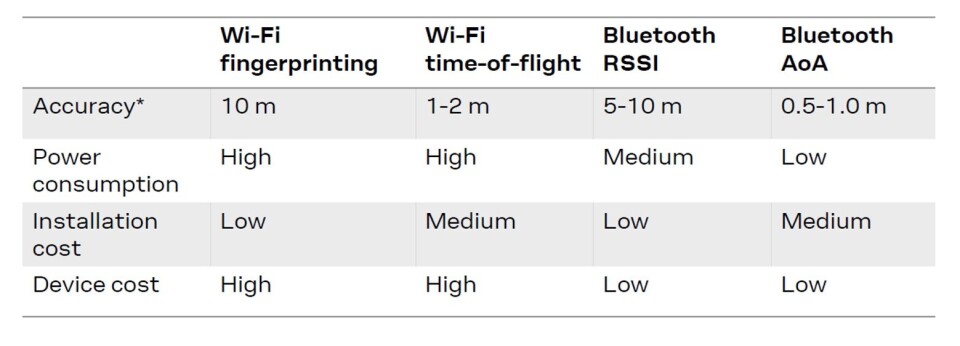
Mens satellittsignaler stort sett ikke er tilgjengelige i disse omgivelsene, har en rekke andre teknologier blitt foreslått for å fylle tomrommet. Enheter utstyrt med mobilmodem kan for eksempel bruke mobilsignaler for å oppnå et posisjonsestimat i forhold til nærliggende mobilmast ved bruk av såkalt nettverksfingeravtrykk eller mer sofistikerte time-of-flight-teknikker. Wi-Fi-utstyrte enheter kan bruke lignende tilnærminger for å lokalisere seg i forhold til Wi-Fi-hotspots. Og de som har Bluetooth kan bruke indikatoren for mottatt signalstyrke (RSSI) for å utlede et omtrentlig avstandsestimat i forhold til utplasserte Bluetooth-nettvarder (beacons).
Begrensninger
Disse teknologiene lider imidlertid alle av begrensninger som har hemmet bruk i de typene brukstilfeller som er oppført ovenfor, der nøyaktigheten, tilgjengeligheten, brukervennligheten og rimeligheten til GNSS-teknologi har satt en høythengende standard. Mobil- og Wi-Fi-baserte lokaliseringsteknologier krever relativt høye maskinvarekostnader for å oppnå nøyaktigheter som likevel ikke lever opp til forventningene. Og til tross for lav nøyaktighet, har Bluetooth RSSI klart å få fotfeste i applikasjoner som krever plasseringsnøyaktighet på romnivå, på grunn av lave kostnader, lave strømbehov og kompatibilitet med de fleste tilkoblede enheter i omløp.
Retningssporing
I 2019 økte Bluetooth SIG satsingen på innendørsposisjonering med introduksjonen av Bluetooth Direction Finding. Tilnærmingen, som bruker en ny type Bluetooth-signal og multiantenne-matriser for å måle bevegelsesvinkelen til en Bluetooth-melding mellom en mobil brikke og ett eller flere statiske ankerpunkter, gir et nytt potensielt svar på den innendørs posisjoneringsproblematikken som, uten tvil for første gang, åpner for å oppfylle alle kravene: Høy presisjon, Enkel utplassering, Lav enhetskostnad og Lavt strømbehov.
Stort potensiale
Helt siden de ble lansert første gang, har Bluetooth-baserte innendørs posisjoneringssystemer høstet betydelig interesse, der ABI Research spår en 28,3 % CAGR for Bluetooth-tag-leveranser fra 2019 til 2025, med den desidert største økningen (64,2 %) forventet i smarte kontorer og det største absolutte tallet (over 163 millioner) innen lager og logistikkvertikaler. På grunn av systemets komplementaritet med våre utendørs GNSS-løsninger, det enorme globale økosystemet av virksomheter som utvikler løsninger basert på teknologien, dens lave effekt og kostnader, og posisjoneringsnøyaktighetene på mindre enn en meter som den kan levere, har vi i u-blox fokusert betydelige FoU-aktiviteter på å fremme bruken av teknologien.
Høy presisjon med Bluetooth
Den underliggende teknologien for Bluetooth innendørs posisjonering er Bluetooth Direction Finding. Som navnet indikerer, gjør Bluetooth-retningsfinning, som kommer i to varianter, det mulig å bestemme kjøreretningen til et Bluetooth-signal mellom en mobil brikke og et fast ankerpunkt. Når det gjelder ankomstvinkel (AoA), beregner ankerpunktet retningen til det innkommende signalet som ble overført av taggen. Ved avgangsvinkel (AoD) blir rollene snudd, og taggen har i oppgave å beregne vinkelen som signalet ble overført fra ankerpunktet.
AoA-evaluering
I denne artikkelen fokuserer vi på AoA, som passer best for innendørs posisjoneringsløsninger, mens AoD har fordeler for innendørs navigasjonsløsninger.
For å evaluere teknologien bygde vi en AoA-basert Bluetooth-retningssøkende demo på våre kontorer i Malmö, Sverige, der vi programmerte en servo montert på et retningsfinnende ankerpunkt for å spore en bevegelig Bluetooth-tag basert på ankomstvinkelen, beregnet i sanntid. En video av forsøket er tilgjengelig her.
Hemmeligheter
Det er to hemmeligheter knyttet til hvordan Bluetooth-retningsfinning fungerer. Den første er et nytt Bluetooth-retningsfinnende signal med tilleggsdata kalt en konstanttoneutvidelse (CTE). Mens resten av Bluetooth-meldingen er modulert for å bære data, består CTE bare av en streng med "enere". Som et resultat kan mottakeren bruke denne delen av meldingen til nøyaktig å måle faseforskjeller mellom signaler. Som bringer oss til den andre hemmeligheten for hvordan Bluetooth-retningsfinning fungerer. Inne i hvert ankerpunkt skjuler det seg ikke en enkelt antenne, men en multiantenne-matrise.
Faseforskyvning

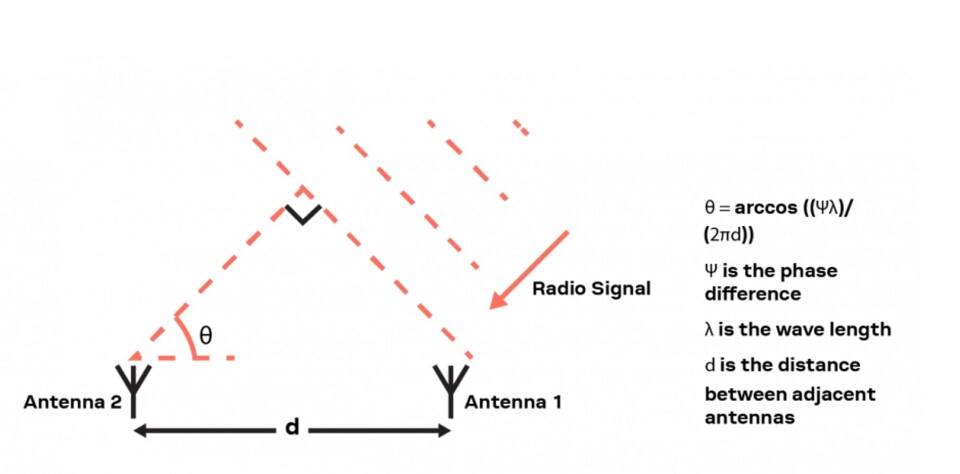
Figur 1 illustrerer hvordan retningsfinnersignalet som sendes ut av den mobile brikken når de individuelle antennene til det statiske ankerpunktets antennegruppe. På grunn av forskjellen i tilbakelagt distanse, mottar hver antenne signalet med en liten faseforskyvning i forhold til de andre, noe som er målbart takket være CTE. Algoritmer som kjører på en mikrokontroller (MCU) innebygd i ankerpunktet kan deretter analysere disse dataene for å beregne signalets ankomstvinkel med en omtrentlig nøyaktighet på +/- X grader.
Triangulering
Når det brukes flere ankerpunkter i stedet for et enkelt ankerpunkt, kan ankomstvinklene fra flere ankerpunkter brukes til å triangulere den omtrentlige plasseringen av sporeren. Dette krever at de nøyaktige posisjonene og orienteringene til ankerpunktene legges inn i posisjoneringsmotoren, som deretter kjører en annen algoritme for å beregne plasseringen – i 2D eller i 3D – til den merkede ressursen, basert på ankomstvinklene beregnet av hvert ankerpunkt.
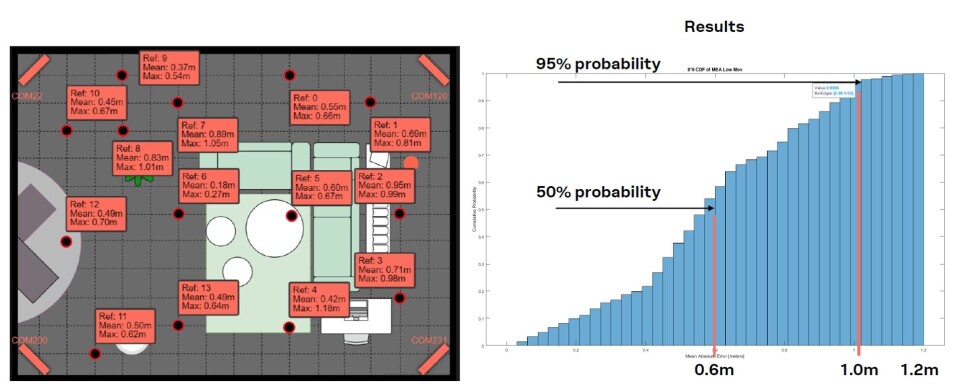
I et enkelt kontoroppsett på 8 x 6 meter med fire ankerpunkter montert i hjørnene, oppnådde vi en gjennomsnittlig nøyaktighet på under 1 meter med 95 % sannsynlighet.
Utprøving av teknologien i et industrielt lager
Vi testet ut vår Bluetooth-baserte innendørs posisjoneringsløsning i et reelt, industrielt lager – et typisk anvendelsesscenario for varesporingsapplikasjoner. Det 30- ganger 50-meter lageret hadde metallhyller for å lagre utstyr og esker. Mens Bluetooth-spesifikasjonen definerer de nedre lagene for å håndtere rå RF data, spesifiserer den ikke algoritmen for å beregne den aktuelle ankomstvinkelen. For utprøvingen utviklet vi derfor en effektiv algoritme som kunne kjøres på den innvevde MCUen i Bluetooth-brikken, samtidig som vi ivaretok både høy nøyaktighet og oppdateringsfrekvens. Vi fokuserte spesielt på å optimalisere RF-front-end, antennene, de innvevde algoritmene som kjører i ankerpunktenes Bluetooth-moduler, og det trådløse ryggradsnettet for å kople ankerpunktene til et nettverk.
En Bluetooth tag og den L-formede antennematrisen som ble brukt i ankerpunktene våre er beskrevet i bildet under.
Ankerpunkter
Til forsøket vårt brukte vi ti ankerpunkter for å dekke et seks meter høyt volum med et fotavtrykk på omtrent 1000 kvadratmeter. Etter nøye planlegging og forberedelse var installasjonen av posisjoneringssystemet ikke-forstyrrende, og tok bare rundt to timer. For å maksimere siktlinjen mellom sporingsbrikkene og multiantenne-matrisene, monterte vi ankerpunktene mellom tre og fem meter fra bakken.
Sporing
Vi forenklet implementeringen ved å bruke tredjeparts sporingsprogramvare, i vårt tilfelle brukte vi Traxmate, som lar oss enkelt legge inn posisjonene og orienteringene til ankerpunktene og konfigurere posisjoneringsmotoren ved hjelp av en integrert API. Til slutt satte vi opp ryggradsnettet basert på Wi-Fi- mellom hvert ankerpunkt og posisjoneringsmotoren.
Mange hensyn i oppsettet
I vår test la vi ekstra innsats i å designe oppsettet for å levere pålitelig ytelse i et innendørsmiljø som fanget opp mye av kompleksiteten som de fleste innendørs utplasseringer vil ha. Først plasserte vi ankerpunktene strategisk for å maksimere sannsynligheten for siktlinje mellom alle sannsynlige merkeposisjoner og minst tre ankerpunkter. På toppen av det måtte vi håndtere flerveiseffekter, forårsaket for eksempel når radiosignaler reflekteres fra vegger. Algoritmene som kjører i ankerpunktene våre for å beregne vinkler inkluderer flerveis-demping, hvilket leverer robust ytelse, selv i lagerets utfordrende radiomiljø.
Leverer som lovet
Vår erfaring med å gjennomføre denne proof-of-concept-implementeringen har bare styrket vår overbevisning om at Bluetooth-basert høypresisjon innendørsposisjonering kan levere hva det lover. For det første, hvis den er godt utplassert, kan den levere nøyaktigheter på mindre enn en meter, som forventes av nye bruksområder for innendørs posisjonering. Typisk for Bluetooth-enheter, er kostnaden for nødvendig maskinvare godt under prisen for konkurrerende teknologier, og det samme gjelder energikravene. Implementering av innendørs posisjoneringsløsninger har lenge vært utfordrende. Integrasjon av maskinvareoppsettet vi brukte med nettgrensesnitt som det fra Traxmate, har gjort mye for å forenkle implementeringen.
Oppsummering
Med lanseringen av Bluetooth-retningsbestemmelse har Bluetooth SIG kommet med en sterkt overbevisende løsning på problemet med innendørs posisjonering, som adresserer mange av manglene ved løsninger som for tiden er på markedet. Våre erfaringer med teknologien i et «følg meg»-brukstilfelle, der retningsbestemmelse ble brukt til å styre en servo (som for eksempel kunne holde et kamera), i en innendørs posisjoneringsrute i kontorskala, og proof-of-concept i et reelt industrielt lager, bekrefter teknologipotensialet for å transformere innendørs brukstilfeller med plasseringsbevissthet, akkurat som GNSS-teknologier har gjort utendørs.
For å få vite mer om maskinvaren vi brukte i våre utprøvinger og «proof of concept», og for å dra nytte av algoritmene vi utviklet for å beregne ankomstvinklene ved hvert ankerpunkt, beregne posisjonen i posisjoneringsmotoren, og for å redusere flerveiseffekter for å øke påliteligheten av løsningen i virkelige implementeringer, oppfordrer vi deg til å ta en titt på våre Bluetooth Direction Finding og Bluetooth indoor positioning explorer kits og gjerne ta kontakt på https://www.u-blox.com/en/contact-u-blox.
Om forfatteren: Erik Carlberg er Senior Product Manager, Product Strategy Short Range Radio, u-blox





























