Et første skritt mot lavkost distribuert akustisk datafangst
Måling av impulsrespons (IR), responsen fra et dynamisk system når en uendelig smal impuls mates inn, er kanskje et av de viktigste verktøyene en akustiker har. Det tillater karakterisering av høyttalere, det gir informasjon om frekvensavhengig isolasjon mot støy mellom rom, og utledning av akustiske parametere som etterklangstid.
Denne artikkelen er 2 år eller eldre
Følgelig har det vært en konstant utvikling av nye akustiske måleteknikker der fokus har vært på å forbedre signal/støy-forhold (SNR), samt sikre immunitet mot synkroniseringsproblemer mellom de digitale systemene som brukes når avspilling og opptakssystemene er adskilt.
Når det er sagt, fokuserte ikke oppgaven min på å foreslå en ny måleteknikk, eller å forbedre en eksisterende. Arbeidet mitt, som ble utført ved NTNU i løpet av det siste året av det europeiske masterprogrammet i innvevde datasystemer EMECS, fokuserte på utfordringene knyttet til denne typen akustiske målinger i komplekse miljø og situasjoner.
Distribuert akustisk datafangst
Akustiske målesystemer (AMS) kan kategoriseres basert på maskinvaren som brukes. Den første kategorien av AMS bruker dedikert maskinvare og programvare for generering, innsamling og behandling av akustiske signaler. Den andre kategorien AMS er avhengig av en vanlig datamaskin og et eksternt lydkort for å generere og ta opp lydsignaler. Denne metoden overlater signalbehandlingsoppgaven til tredjeparts programvare eller programvare utviklet av akustikeren.
Uten tvil er den første typen AMS mer robust fordi alt er spesielt designet for akustiske målinger, og det er en tett integrasjon mellom komponentene i systemet. Problemet med dette integreringsnivået er imidlertid at det gjør systemet betydelig mer kostbart. Motsatt er den andre tilnærmingen til akustiske målinger mye rimeligere, men potensielt ikke så nøyaktig, og kanskje ikke egnet for alle målesituasjoner.
Tenk for eksempel på måling av de akustiske egenskapene til en romdeler (dvs. hvor god lydisolering den gir mellom rommene). Denne målingen krever at du plasserer en mikrofon i det ene rommet og en høyttaler i det andre. Siden både mikrofon og høyttaler er koblet til det samme lydkortet i et lavkost-AMS, vil det være nødvendig å føre kabler mellom rommene som potensielt kan påvirke kvaliteten på målingen betydelig. Et annet eksempel er et utendørs lydforplantningseksperiment der bruk av lange kabler fører til signaldegradering.
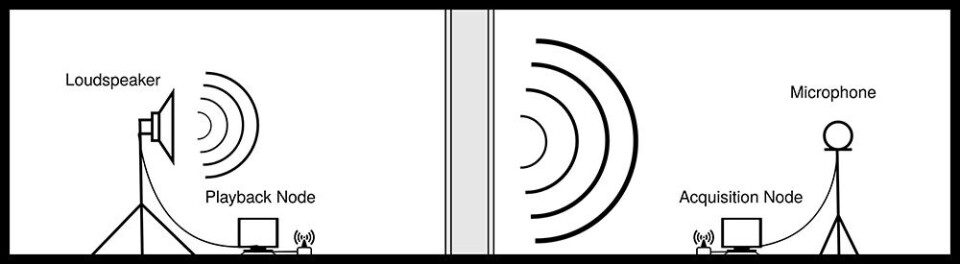
Målet med oppgaven min var å avgjøre om det er mulig å bygge et tilstrekkelig godt, men samtidig rimelig, system som ville kunne løse disse problemene ved å bruke en form for distribuert datafangst. Dette inkluderte å designe og bygge en prototype sammensatt av minst to trådløse synkroniserte noder, hvor den ene fungerer som avspillingsnode og den andre fungerer som innsamlings- og etterbehandlingsnode.
Designmetodikk
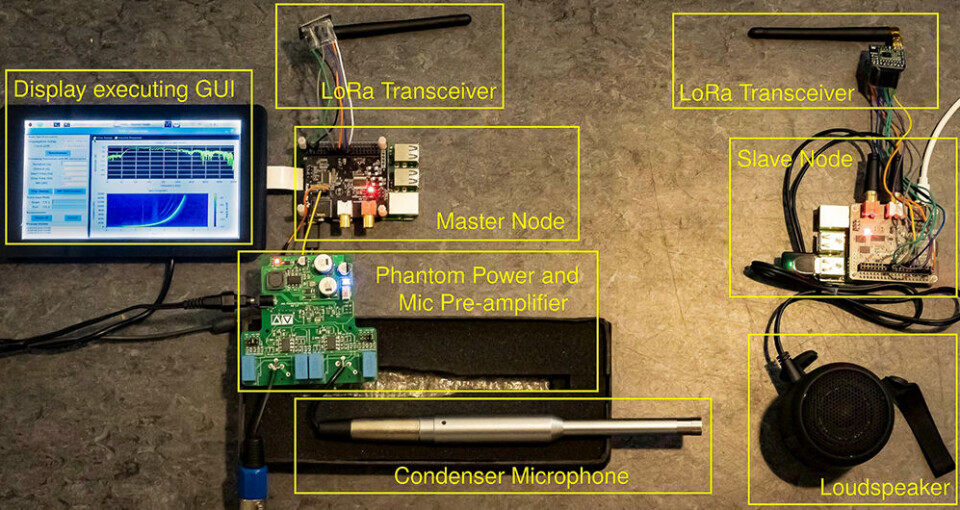
Designjobben begynte med definisjon av funksjonelle og ikke-funksjonelle krav, og tegning av et blokkdiagram for å beskrive systemets arkitektur. Gitt tidsbegrensningene for arbeidet, var fokuset å utvikle en fungerende prototype raskt, uavhengig av om det eksisterte komponenter som var mer passende for sluttproduktet. Flere MCU-utviklingskort og enkeltkortdatamaskiner ble vurdert for prosesseringsenheten, men etter grundig vurdering ble en Raspberry Pi valgt ut fra det store utvalget av kompatibel maskinvare som er tilgjengelig i form av utvidelseskort.
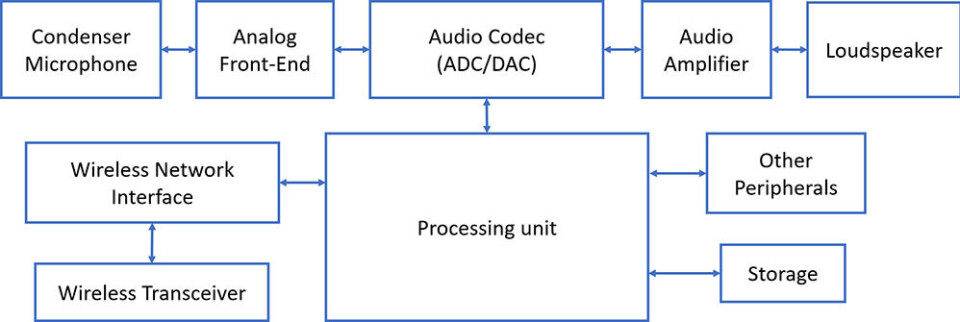
Audioinnsamling og generering ble utført på et utvidelseskort utviklet av HiFiBerry som inneholder en 2-kanal høykvalitets lydcodec med høy SNR og lav total harmonisk forvrengning (THD). Trådløs kommunikasjon mellom nodene krevde også ekstra maskinvare. Siden det ikke var behov for høye datahastigheter (bare enkle kontrollkommandoer for å synkronisere avspilling og innsamling), var rekkevidde den eneste viktige parameteren. Både Zigbee og LoRa ble vurdert, men til slutt ble LoRa valgt på grunn av en personlig interesse for å utforske teknologien.
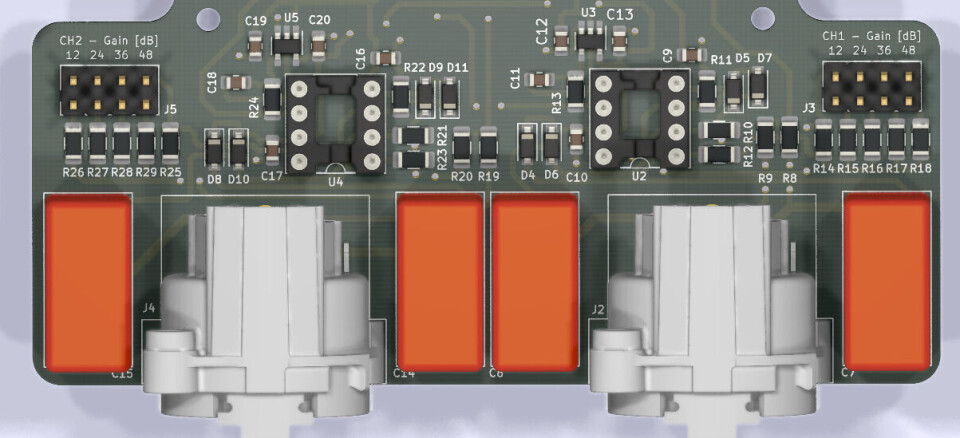
Til slutt, siden det ble vanskelig å finne en passende ferdiglaget analog front-end, ble denne designet spesielt for prototypen.
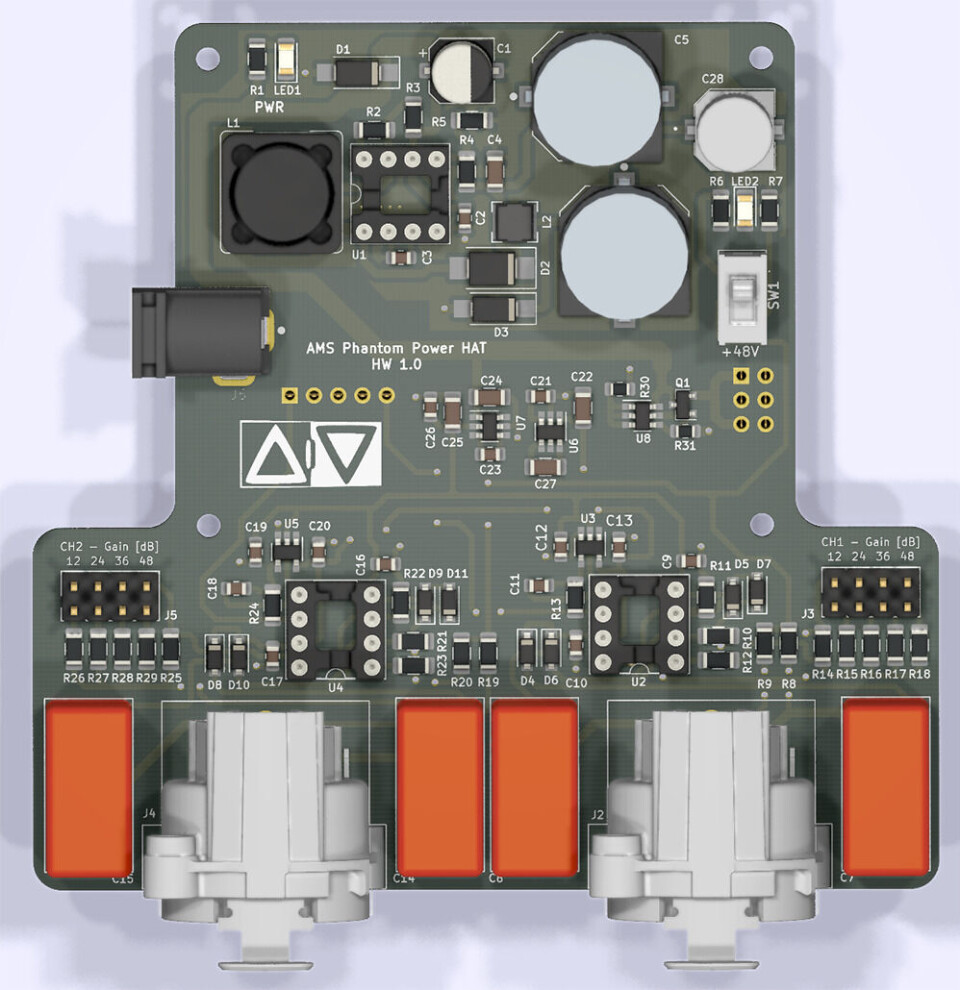
Designet inkluderte en svitsjet strømforsyning som kunne gi de 48 volt som kreves for å drive forforsterkeren i mikrofonen (gjerne kjent som fantomstrømforsyning), og to støysvake mikrofonforsterkere (for å dra nytte av de to tilgjengelige inngangskanalene i HiFiBerry-utvidelseskortet).
Programvareutviklingen ble planlagt i tre trinn og fokuserte på å raskt kunne vise at konseptet fungerte. Av denne grunn ble Python valgt som programmeringsspråk, gitt mengden Python-moduler som finnes for signalbehandling og akustikk.
Den første fasen handlet om signalgenerering og -innsamling. En sjekk i litteraturen avdekket at foretrukket metode for IR involverer bruk av sveipede sinus-signaler. Metoden består i å samtidig generere og registrere en sveipet sinus for å fange systemets respons, for deretter å inversfiltrere, transformere til frekvensdomenet, dividere, og til slutt inverstransformere tilbake til tidsdomenet for å beregne IR.
Teknikken gjør det mulig å skille systemets lineære respons fra systemets ikke-lineære respons (dvs. harmonisk forvrengning), og i motsetning til andre måleteknikker (f.eks. MLS), krever det ikke en nøyaktig synkronisering mellom sampleren som brukes til avspilling av signalet og den som brukes til opptak av responsen til systemet. Under normale omstendigheter er dette ikke et problem fordi den samme enheten håndterer avspilling og innsamling, men i distribuert AMS håndteres disse oppgavene av ulike noder i systemet, noe som gjør sveipet sinus langt mer passende enn andre teknikker.
Den andre fasen av programvareutviklingen fokuserte på nodesynkronisering. Det ble forsøkt å implementere en synkroniseringsprotokoll kjent som Timing-sync Protocol for Sensor Networks (TPSN) som teoretisk kan synkronisere noder med en gjennomsnittlig nøyaktighet på mindre enn 20 µs.
Til slutt ble det utviklet et grafisk brukergrensesnitt (GUI) for å gi brukeren en måte å konfigurere målingen og visualisere resultatene.
Evaluering av implementert AMS
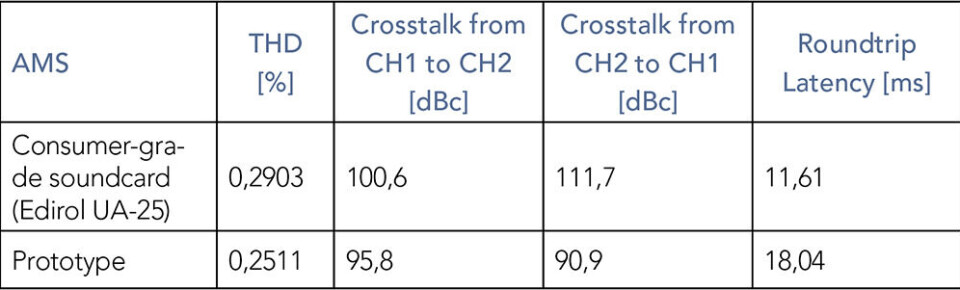
Etter at prototypen var implementert, ble lydkvaliteten evaluert ved å gjennomføre lukket-sløyfemålinger på både prototype-AMS og en lavkostnads AMS. Dette gjorde det mulig å fastslå og sammenligne verdier for THD, krysstale mellom kanaler og tidsforsinkelse. Målingene ble gjort ved fysisk å koble en kabel mellom utgangen og inngangen på den enkelte AMS for å måle IR. I prototypens tilfelle betydde det å koble avspillingsnodens utgang til innsamlingsnodens inngang mens tidssynkronisering fortsatt ble gjort trådløst.
Når det gjelder lydkvalitet, fungerte prototypen overraskende bra. Parametere som lydforsinkelse og THD var nær de som ble målt i lavkostsystemet bestående av en bærbar datamaskin og et forbrukerstandard lydkort. Det ble detektert noe krysstale mellom prototypens to kanaler, men dette var forventet gitt at det ikke var nok tid til å produsere en forbedret versjon av den analoge frontenden. Det er verdt å nevne at på grunn av mangel på spesialutstyr for å utføre målingene, gir de presenterte resultatene bare en relativ sammenligning mellom prototypen og lavkostsystemet, ikke absolutte tallverdier.
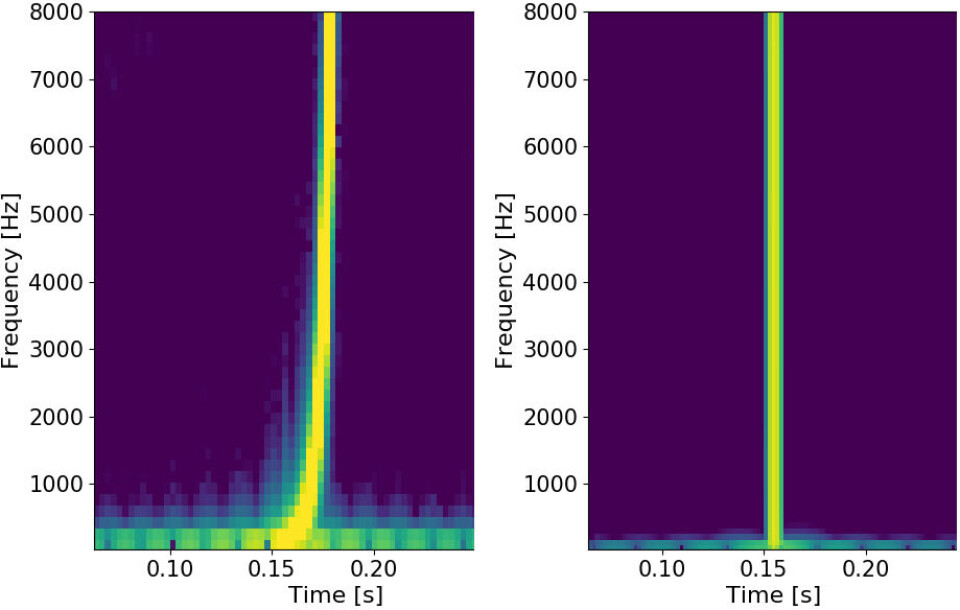
Evalueringen av de distribuerte innsamlingsegenskapene ble gjort ved først å utføre flere synkroniseringseksperiment for å måle nøyaktighet, og deretter ved å evaluere kvaliteten på de oppnådde IR’ene.
Implementeringen av synkroniseringsprotokollen (dvs. TPSN) var skuffende, delvis på grunn av operativsystemet som ble brukt. Et RTOS- eller «bare-metal»-programmering hadde vært bedre, men det ville også ha økt utviklingstiden.
På den andre siden ga den distribuerte akustiske målingen av IR utmerkede resultater. Selv for lange testsignaler (f.eks. seksti sekunder) ble ingen uregelmessigheter eller skjevheter oppdaget i de oppnådde IR’ene, noe som ville indikert forskjell mellom klokkene i systemet.
Noen tanker til slutt
Samlet sett kan det sies at prototypen var vellykket, da den muliggjør målinger i komplekse scenarier der en lavkost AMS ikke er egnet. Konseptet ble også bevist, og åpner for fremtidig utvikling med fokus på en mer strømlinjeformet prototype med forbedret lydkvalitet og nodesynkronisering. Dette vil kreve bruk av mer egnede maskinvare-komponenter (spesielt prosessorenheten) på bekostning av en mer tidkrevende utviklingsprosess.
For mer informasjon og litteraturhenvisninger, se A. Mondragon Clavijo, «Distribuert akustisk datafangst med lavkost innvevde systemer», Masteroppgave, European Master in Embedded Computing Systems (EMECS), NTNU, juni 2020, er tilgjengelig på:





























