11 myter om induktive posisjonssensorer
Automatiske maskiner og selvkjørende kjøretøy er avhengige av nøyaktige posisjons- og bevegelsesmålinger, og en raskt fremvoksende teknologi er den induktive posisjonssensoren.
Denne artikkelen er 2 år eller eldre
Vi har ventet lenge på det, og nå er det i ferd med å implementeres på bred basis: Kunstig intelligens (AI). Fra automatiske fabrikker, selvkjørende bilder og lastebiler til robotsjåfører ser vi nå hvordan AI vil gjøre automatiske maskiner mer effektive, lønnsomme og forbedre våre liv. Og i sentrum av disse automatiske maskinene og kjøretøyene er deres evne til å måle posisjon og bevegelse nøyaktig.
Det er mange måter å måle posisjon på, men en raskt voksende teknologi er den induktive posisjonssensoren. Nøyaktighet, støyimmunitet og kostnadseffektivitet er noen av fordelene med denne teknologien. Nedenfor blir noen misforståelser om induktive posisjonssensorer avklart, sammen med en sammenligning med andre sensorteknologier som Hall-effekt og magnetoresistive sensorer.
Myte #1: Induktive sensorer anvender induktans for å måle posisjon
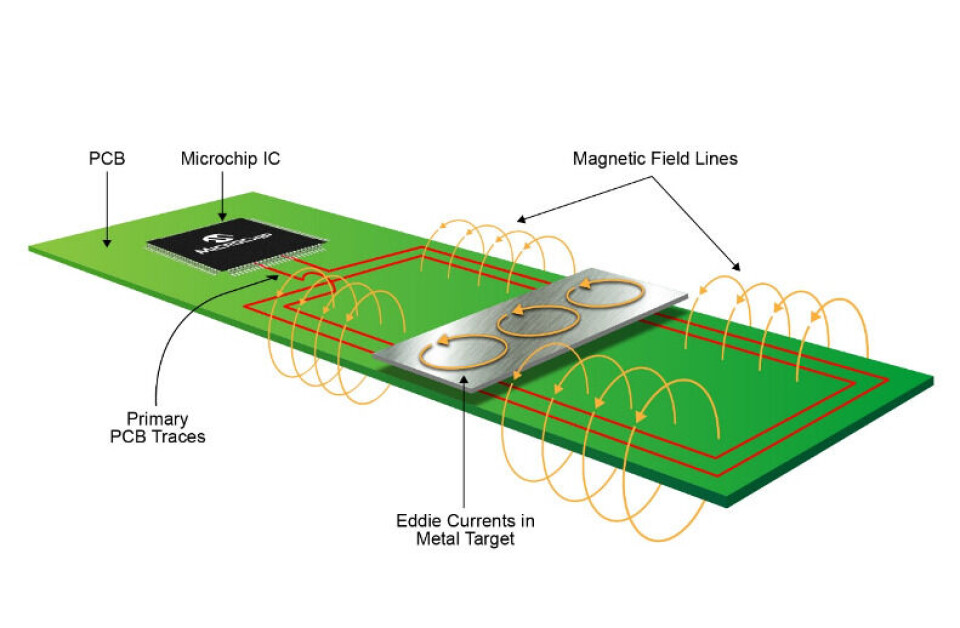
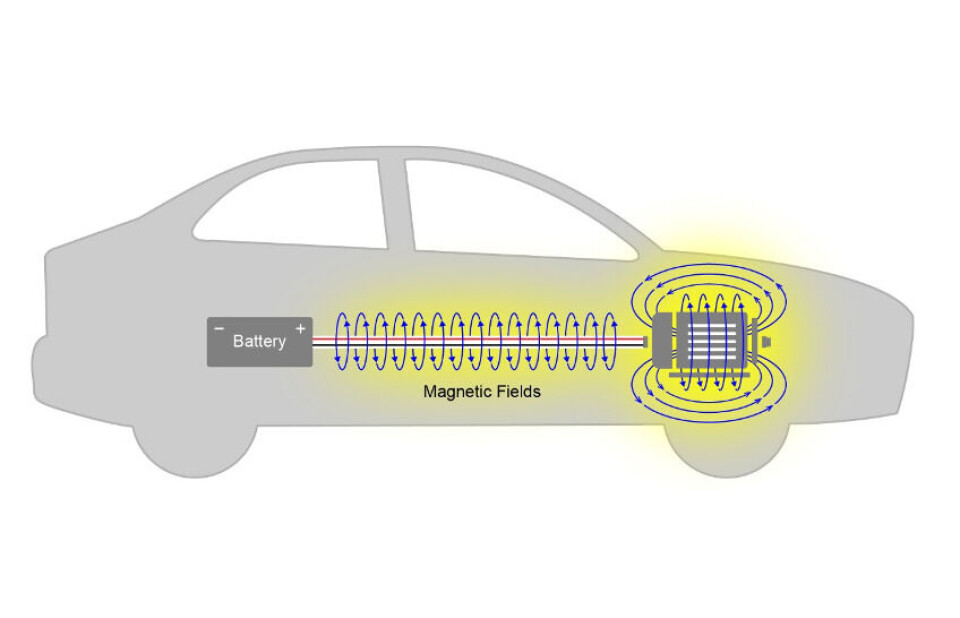
Navnet kan være forvirrende, men sannheten er at induktive sensorer ikke måler induktans. I stedet bruker de den elektromagnetiske induksjonen av et magnetfelt i et målobjekt av metall sammen med de velkjente egenskapene til en luftkjerne-transformator og Faradays lov for å nøyaktig lokalisere forstyrrelsen dette objektet utøver på magnetfeltet. Det kan høres komplisert ut for mange av oss som har glemt alt vi lærte om elektromagnetisk feltteori fra skolen, men enkelt sagt måler induktive sensorer forstyrrelsen i et magnetfelt fra et ledende mål.
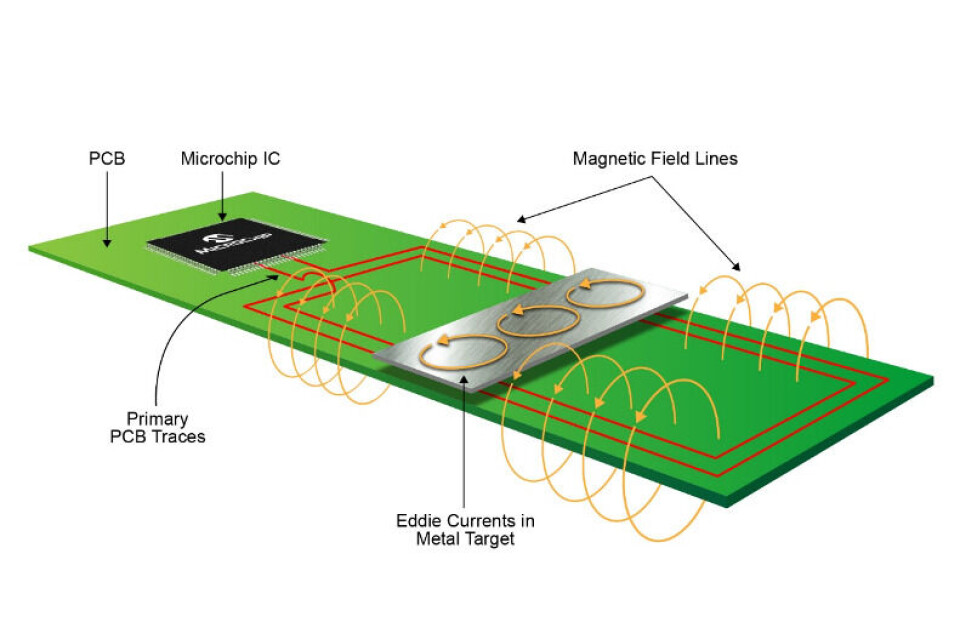
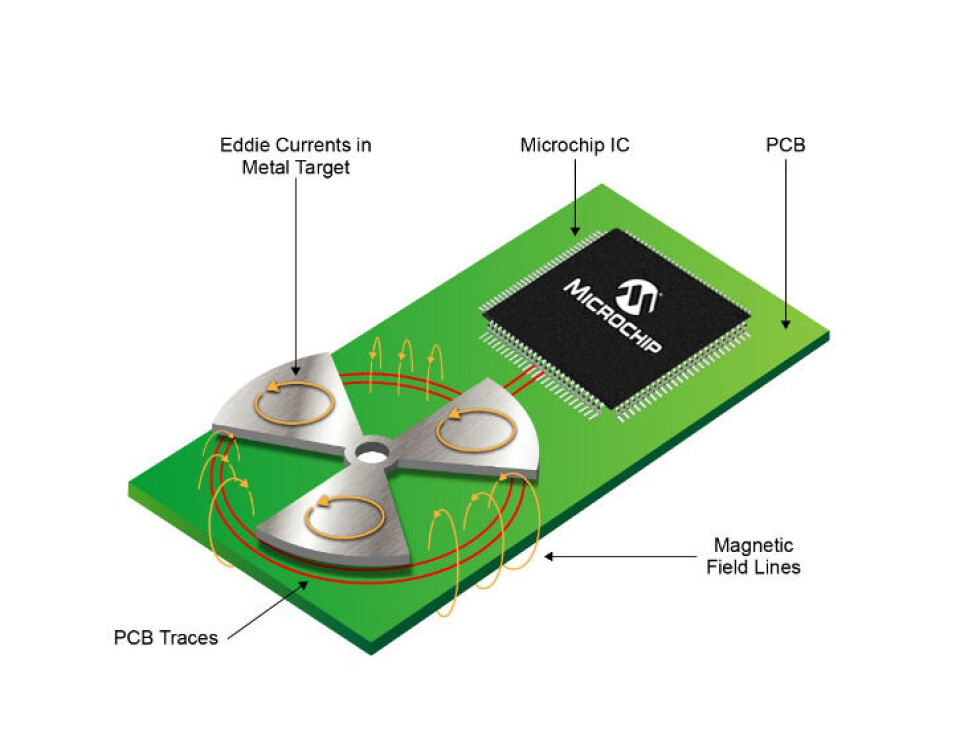
I tillegg genereres ikke dette magnetfeltet av en permanent magnet - som er nødvendig for Hall-effektsensorer og magnetoresistive sensorer - og blir i stedet generert av primærviklingen til en transformator. To sekundære spoler brukes til å detektere dette magnetfeltet, og akkurat som med en transformator, bruker vi Faradays lov for å konvertere dette feltet til en spenning. Et metallobjekt plassert i dette magnetfeltet vil indusere virvelstrømmer som motarbeider magnetfeltet og reduserer feltstyrken til null ved målet. Ved at de er plassert på forskjellige fysiske steder, vil de to mottakerspolene detektere en annen spenning. Posisjonen til målet kan beregnes ved ganske enkelt å beregne forholdet mellom disse to mottatte spolespenningene.
Myte #2: Induktive posisjonssensorer er ikke nøyaktige
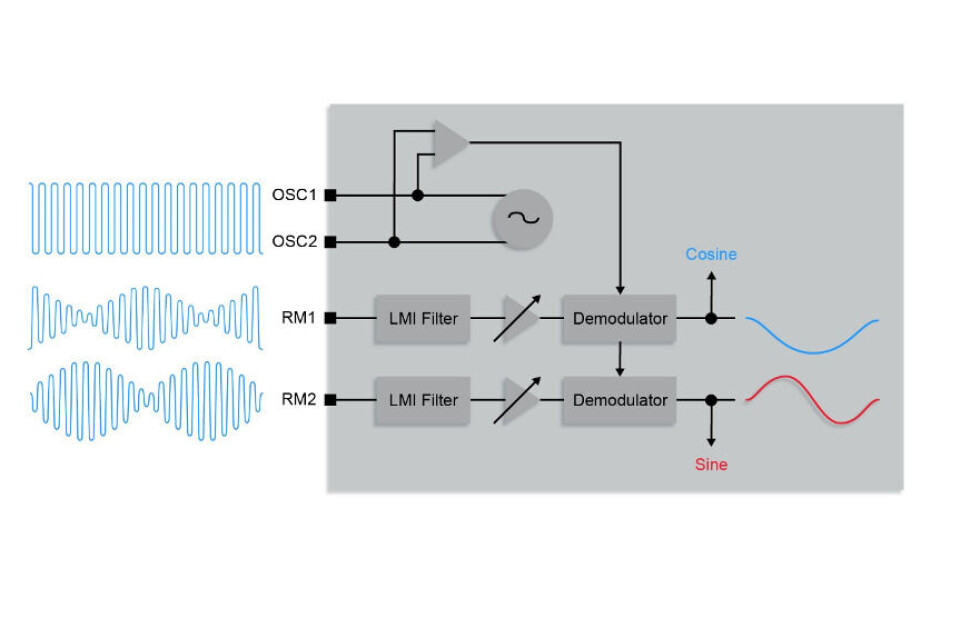
Dette er en myte det er enkelt å avvise, fordi induktive posisjonssensorer er veldig nøyaktige og utmerker seg ved høyere temperaturer, der andre magnetbaserte systemer har problemer. Den største årsaken til nøyaktigheten i induktive posisjonssensorer er at de ikke baserer seg på den permanente magnetens ulineære natur. I stedet leter de bare etter forstyrrelsen i det selvgenererte magnetfeltet. Som et resultat kan det oppnås en feilmargin under +/- 0,1 prosent over hele måleområdet ved romtemperatur. Feilmarginer under +/- 0,3 prosent er oppnåelig med temperaturvariasjoner og med variasjoner i luftspalte mellom mål og sensor. I tillegg er den komplette algoritmen designet for å enten eliminere temperaturvariasjoner eller minimere effekten av disse. For eksempel vil den induktive posisjonssensoren eksitere magnetfeltet med en frekvens mellom 1 og 6 MHz, men ved bruk av en LC-oscillator. Begge disse størrelsene kan endres med temperaturen, men dette har ingen innvirkning på posisjonen. Årsaken er at de sekundære mottakskanalene bruker synkron demodulering, som er en funksjon av den primære oscillatoren.
Denne avdriften vil uansett ikke ha noen innvirkning på amplituden til de mottatte signalene. Utover temperatur, kan metallgjenstander i nærheten av sensoren ha innvirkning på magnetfeltet. Som et resultat er det nødvendig med noe kalibrering, men kalibreringen endres ikke med temperaturen. For eksempel bruker Microchip Technologys LX3302A åtte kalibreringssegmenter. 13-bits analog-til-digitalomformere (ADCer) og 32-bits prosessorer hjelper også med å eliminere eventuelle beregnings- og kvantiseringsfeil som kan oppstå, og gir 12 bits utgangsoppløsning over måleområdet.
Myte #3: Induktive posisjonssensorer er kostbare
Det er ikke vanlig å få det beste fra begge verdener - høy ytelse til en rimelig pris - men induktive sensorer leverer også her. Mens Hall-effekt og magnetoresistive sensorer krever at en permanent magnet er produsert med riktig toleranse og styrke for å få anstendig nøyaktighet, trenger induktive sensorer bare et metallstykke som mål, og sparer brukeren for utgiften til magneten. Selv om kretskortet må være større for å rute sensorlederne, koster dette vanligvis betydelig mindre enn kostnaden for magneten. Og hvis du likevel har ekstra kortplass, kan denne delen være gratis. Dermed er den induktive posisjonssensoren en mer kostnadseffektiv løsning i forhold til Hall-effekt og magnetoresistive løsninger, fordi den gir magnetfeltdeteksjon uten magnet.
Myte #4: Induktive posisjonssensorer er følsomme for eksterne magnetfelt
Dagens automatiske maskiner skaper flere magnetiske felt enn noensinne, noe som forårsaker problemer med Hall-effekt og magnetoreseptor-sensorene. Induktive posisjonssensorer bruker aktiv demodulering for å eliminere disse strøfeltene.
Neste generasjon elektriske biler kan ha flere hundre ampere strøm fra batteriene til drivmotoren. I tillegg har de fleste biler mer enn tre børsteløse DC (BLDC) motorer for å bevege bilen, den elektroniske servostyringen og bremseassistentmotoren. Alle disse systemene genererer magnetiske felt. På grunn av den raske økningen av disse løpske magnetfeltene, kommer nye spesifikasjoner med krav om flere immunitetstester ved høyere magnetfelt. I bilindustrien blir bilelektronikk nå utsatt for et 4mT DC-felt under EMC-kvalifisering, og falske avlesninger i noen av de sikkerhetskritiske sensorene - servostyring, gasspedal, trekkrotorposisjon - kan ikke forekomme.
Det fine med induktiv posisjonssensing er at den er immun mot denne støyen, fordi den aktivt filtrerer ut frekvensen den trenger for deteksjon. Fordi induktive posisjonssensorer ikke bruker noe magnetisk materiale, tar de heller ikke opp noe DC-magnetfelt. Med andre ord er Faradays lov null for et statisk magnetfelt. I tillegg vil den synkrone demodulatoren som er beskrevet ovenfor, filtrere ut andre frekvenser over og under den primære eksitasjonsfrekvensen, omtrent på samme måte som du kan velge én AM-radiostasjon selv om antennen tar opp hele AM-båndet. Den samme typen utvelgelse er ikke mulig med Hall-effekt og magnetoresistive sensorer.
Myte #5: Induktive posisjonssensorer er en ny teknologi
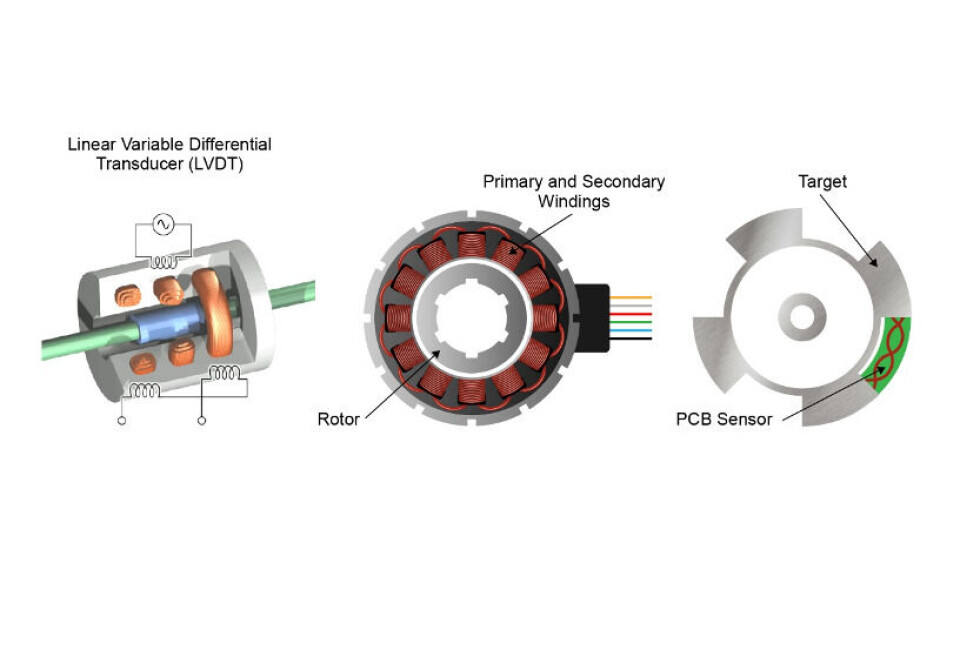
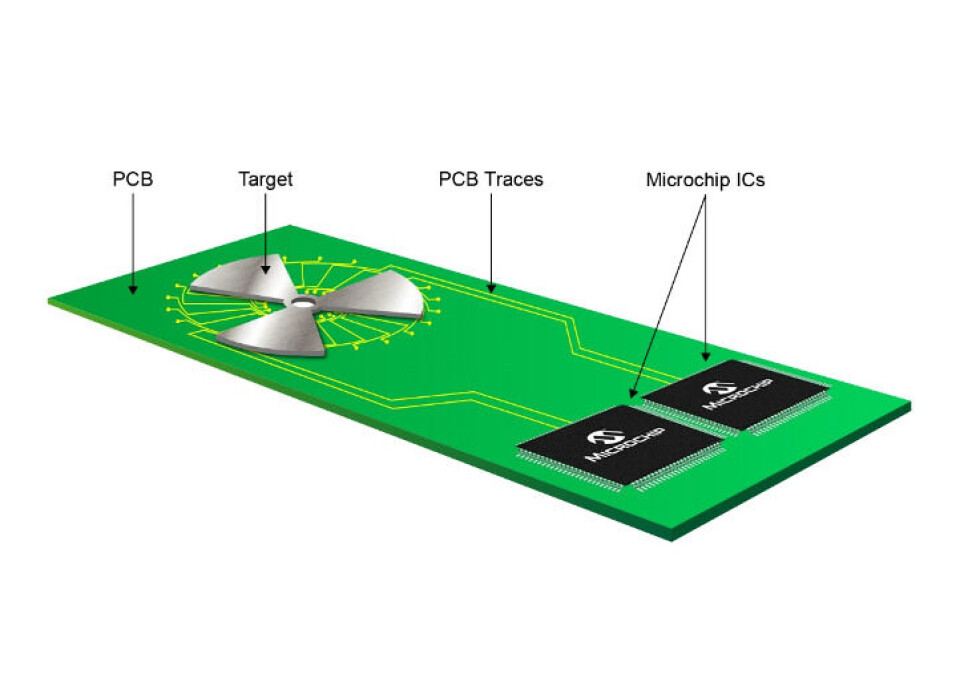
Induktive posisjonssensorer bruker et mønsterkort som sensor og et stykke metall som mål. Selv om dette kan være en ny måte å implementere sensing på, er teknologien veletablert. Den lineære spenningsdifferensialtransformatoren (LVDT) er en svært nær slektning til induktiv posisjonsregistrering. LVDT vil bruke en primærspole og to sekundære spoler for å oppdage posisjonen til en metallaksel i robotapplikasjoner. Induktive posisjonssensorer bruker mye av de samme teknikkene for å redusere viklingene til bare et mønsterkort. Magnetiske resolvere, den roterende versjonen av LVDT, bruker også lignende teknikker. Igjen, i stedet for med en transformatorlignende metallstruktur, utfører induktive posisjonssensorer den samme funksjonen som kan oppnås ved å bruke ledere på et mønsterkort. For å føle posisjon bruker både LVDT, resolver og induktive sensorer forholdet mellom to spenninger som er indusert av en forstyrrelse av magnetfeltet av et ledende element.
Myte #6: Redundante induktive sensorer krever dobbelt så mye plass
Kritiske bil- og industrielle applikasjoner trenger ofte redundans for å ivareta det høyeste sikkerhetsnivået. Ved å optimalisere lagene på et mønsterkort og noen intelligente primærviklingsteknikker, krever ikke en dobbel sensor dobbelt kortplass. I stedet kan begge sensorene være i samme område av kortet. I dette tilfellet deler de det samme magnetfeltet, løst koblet av et magnetfelt, og gir fortsatt galvanisk isolasjon. Sekundærlederne kan gå til de to IC-ene, som deretter sender ut uavhengig og redundant posisjon, og dermed forbedrer sikkerheten til applikasjonen.
Myte #7: Induktive posisjonssensorer kan bare håndtere små, lineære målinger
Induktive posisjonssensorer kan måle lineære posisjoner opp til mange forskjellige lengder. Den beste nøyaktigheten oppstår når sensorens lengde er nær det omtrentlige ønskede måleområdet, slik at utgangsoppløsningen kan skaleres over den korteste avstanden. Denne sensorlengden kan variere fra 5 mm til 600 mm og utover for praktiske bruksområder. Eventuelle lengdebegrensninger har å gjøre med oscillatorens evne til å generere riktig LC-resonanssignal. I alle tilfeller er driftsprinsippet det samme: Et magnetfelt genereres, og forstyrrelsen oppdages. Lineære målinger er en klar fordel med denne teknologien, og følsomheten kan oppnås med et enkelt måleprinsipp over mange praktiske måleområder.
Alternativt kan en Hall-effektsensor kreve at flere Hall-effektsensorer må multiplekses når magneten flyttes fra ett sted til et annet. Krysshåndteringen av denne multipleksingen er komplisert og kan påvirkes av temperaturer. En induktiv sensor lider ikke av dette problemet, og kan få en lineær måling som samsvarer med kravene i applikasjonen.
Myte #8: Induktive posisjonssensorer kan kun gjøre lineære målinger
Samtidig som linieære målinger er en absolutt fordel ved denne teknikken, kan indoktive posisjonssensorer også måle roterende- og buefølende mål med de samme fordeler, i form av høyere nøyaktighet og bedre støyimmunitet. Bilpedaler, luftventiler, vannventiler og rotorposisjon er alle eksempler på føleranvendelser som kan dra nytte av induktiv sensorteknologi. Tenk deg en 360-graders rotasjonssensor kun som en lineær sensor der endene er buet for å møte hverandre. Det viser seg at induktive rotasjons-posisjonssensorer er det mest følsomme, ettersom det genererte magnetiske feltet kan være meget enhetlig i enhver radius. Både lineære-, bue- og rotasjonsmålinger er mulige med denne teknologien.
Myte #9: Materialet i målobjektet må være magnetisk
Den induktive posisjonssensoren detekterer en endring i magnetfeltet, det vil si en forstyrrelse forårsaket av et metallobjekt – men det trenger ikke å være et magnetisk materiale. Alt som leder strøm, slik at en indusert hvirvelstrøm kan flyte, vil kunne indusere denne forstyrrelsen. Magnetiske materialer, slik som jern, er også ledende og kan dermed brukes, men metallet i målet vil ha bedre deteksjonsavstand og lavere forsyningsspenning hvis det er laget av en god leder som f.eks. kobber, aluminium eller stål.
Myte #10: Induktive posisjonssensorer må programmeres via kraftinngangen
I en bil ligger mange av sensorapplikasjonene inne i moduler som er koplet til motorstyringsenhetene gjennom et sett med kabler. For en sensor består dette normalt av en kraftleder, jordleder og en utgangspinne. Gjennom å kunne kalibrere modulen via kraftinngangen sikrer man at det ikke trengs ekstra forbindelser til sensorkortet, noe som sparer kostnader og utfordringer ved sammenstilling. Imidlertid krever enkelte applikasjoner en mikrokontroller, og i dette tilfellet vil innvevde applikasjoner gjerne programmere sensoren ved bruk av en annen mikrokontroller, ikke et dedikert testsystem. Microchips LX3302A har nettopp denne funksjonen og kapasiteten, hvilket betyr at den kan programmeres over GPIO-pinnene.
Myte #11: Du er overlatt til deg selv med designet
For ikke så altfor lenge siden krevdes det solid kunnskap om magnetiske felt og tilgang til avanserte verktøy for finite-element simulering eller mengder av prøving og feiling for å oppnå gode resultater. I dag tilbyr IC-leverandørene denne tjenesten for kundene sine, med evalueringskort og -sett som tar deg fra konsept til simulering av faktiske mønsterkortbaner. Enkelte leverandører vil sågar tilby simuleringsresultater som estimerer feil du vil kunne ha med en sensor, før mønsterkortet er testet. Microchip tilbyr denne assistansen, slik at du aldri vil måtte føle deg alene med ditt eget mønsterkortdesign.
En gjennomgang av disse 11 mytene viser induktive posisjonssensorer sammenlignet med Hall effekt- og magnetoresistive sensorer, og illustrerer deres nøyaktighet, immunitet mot magnetisk støy og kosteffektivitet. Er du klar for å prøve ut denne teknologien i ditt neste AI-posisjonsfølende produkt?
Om forfatteren: Mark Smith, PhD, Markedsdirektør, Mixed-Signal and Linear Division, Microchip Technology.